PROJETO
- Título HEADS - Hydrocarbon Early Automatic Detection System
- Laboratório LEAD
- Coordenador Alessandro Jacoud Peixoto
- Início 2016
- Término 2019
- Status Concluído
- Financiador Repsol Sinopec Brasil
Resumo
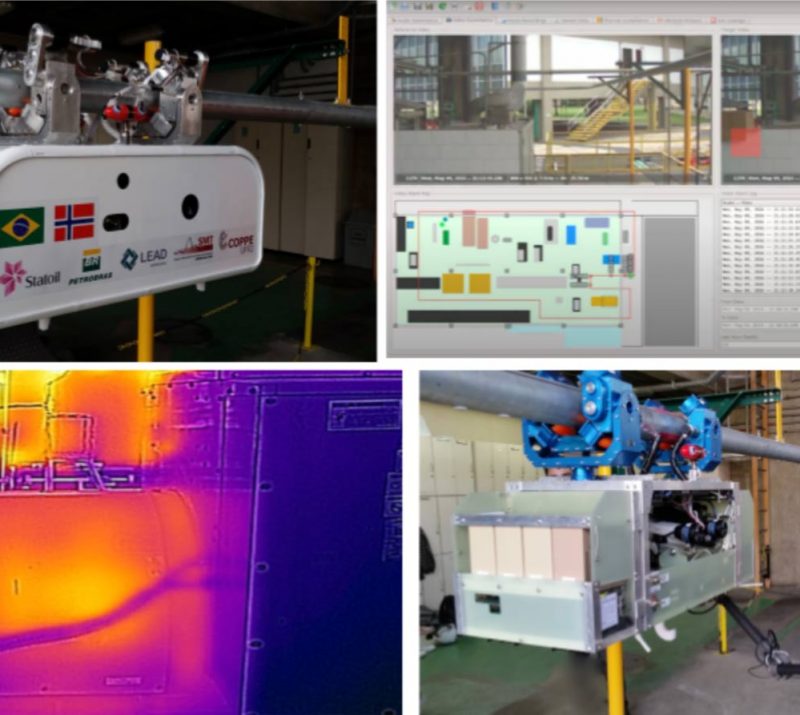
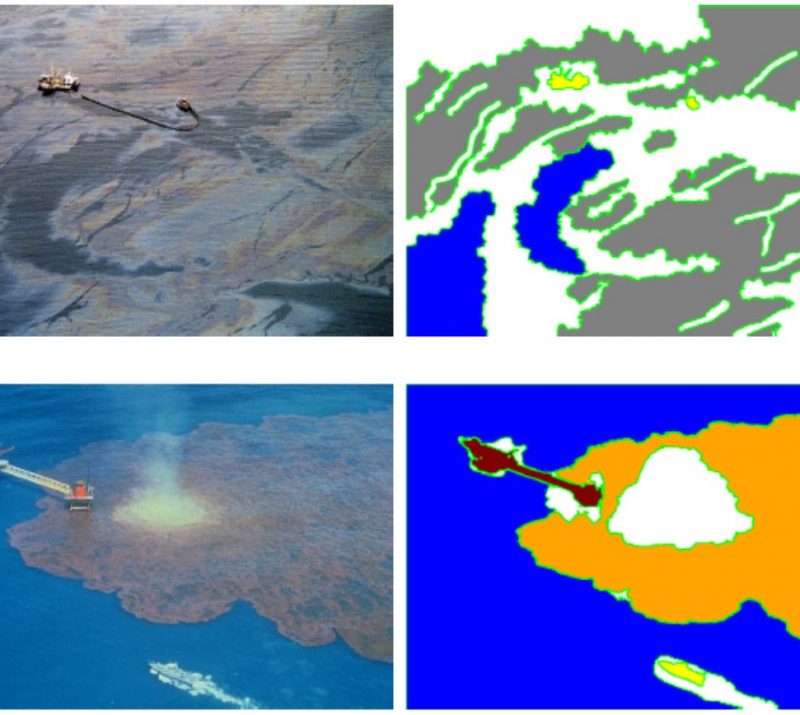
HEADS (Hydrocarbon Early Automatic Detection System) é um sistema automático de detecção de derramamento de óleo desenvolvido pela REPSOL e Indra. O sistema integra as informações de um sensor de radar com imagens térmicas de uma câmera infravermelha em um algoritmo de processamento de sinal para identificar automaticamente derramamentos de óleo na água (mar, oceano, …) sem a necessidade de um operador. A câmera é montada em uma unidade de pan-tilt que recebe setpoints georreferenciados (latitude, longitude, altitude) para apontar a câmera para diferentes locais no mar, realizando uma varredura completa do Campo de Observação, que é definido como a área total que pode ser capturada por um sensor móvel.
O sistema operava até então em ambientes fixos (terminais marítimos e plataformas fixas), mas não conseguia funcionar adequadamente em cenários dinâmicos devido ao movimento do veículo onde o sistema será instalado (navio FPSO, plataformas semi-submersíveis, …), o que degrada as imagens térmicas e, portanto, as capacidades de detecção dos algoritmos de processamento de sinal.
O projeto foi uma colaboração entre LEAD/COPPE/UFRJ, Thirteen Robotics, Tecgraf/PUC-Rio, Repsol Sinopec Brasil, Repsol e Indra, com o objetivo de desenvolver um sistema de estabilização inercial para a câmera térmica e teste o sistema integrado em um veículo marítimo. O sistema de estabilização inercial é ser capaz de rejeitar ativamente ou atenuar suficientemente o movimento do veículo, bem como outros tipos de distúrbios, como atrito e desequilíbrio nas partes mecânicas e vento. A câmera é apontada para uma coordenada georreferenciada, que pode estar a até 2km de distância, com duração de dois minutos. Em outras palavras, a Linha de Visão (LOS), que é definida como o vetor desenhado de um observador para um alvo, deve ser estabilizada. A precisão de apontamento necessária é de 2% do Campo de Visão (FOV) da câmera, que é a extensão do mundo observável visto por uma câmera, geralmente dado em graus de abertura horizontal e vertical.
Resultados
- Reis, M.F., Monteiro, J.C., Costa, R.R. and Leite, A.C. (2018). Super-Twisting Control with Quaternion Feedback for a 3-DoF Inertial Stabilization Platform. In 2018 IEEE Conference on Decision and Control (CDC) (pp. 2193-2198).
- Reis, M.F., Carvalho, G.P., Neves, A.F. and Peixoto, A.J. (2018). Dynamic model and line of sight control of a 3-dof inertial stabilization platform via feedback linearization. In 2018 Annual American Control Conference (ACC) (pp. 1313-1318).
- Reis, M.F., Monteiro, J.C., Carvalho, G.P., Neves, A.F. and Peixoto, A.J. (2018). Identificação e Controle por Torque Computado de uma Plataforma Inercial para Estabilização e Rastreamento da Linha de Visada. Em Anais do XXII Congresso Brasileiro de Automática (CBA).
- Reis, M.F., Costa, R.R. and Leite, A.C. (2018). Super-Twisting Control with Quaternion Feedback for Line-of-Sight Stabilization and Tracking. Em Anais do XXII Congresso Brasileiro de Automática (CBA).
- Reis, M.F. (2018). Line-Of-Sight Stabilization and Tracking Control for Inertial Platforms, M.Sc. thesis, COPPE/UFRJ.
PROJETOS RELACIONADOS