PROJETO
- Título DORIS - Sistema robótico móvel para Inspeção Remota de Instalações Offshore
- Laboratório LEAD, SMT
- Coordenador Ramon Romankevicius Costa (LEAD)
- Início 2012
- Término 2016
- Financiador Petrobras/Statoil
Resumo
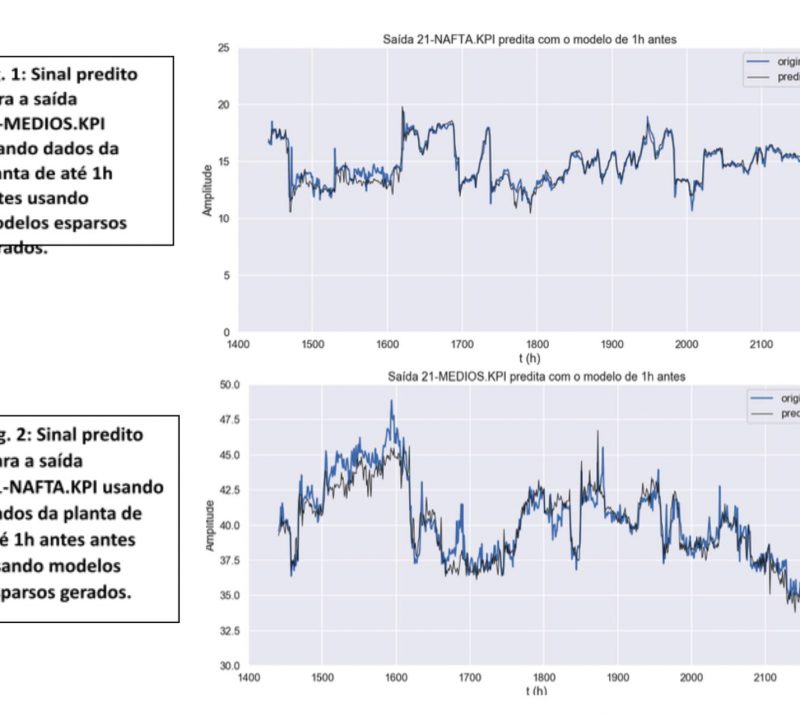
O objetivo deste projeto foi o desenvolvimento de tecnologia essenciais para a supervisão remota, diagnóstico e aquisição de dados destinada a instalações offshore.
O sistema é composto por um robô móvel capaz de transportar diferentes sensores através do ambiente inspecionado em conjunto com algoritmos de processamento de sinal, responsáveis pela análise de dados e identificação de anomalias.
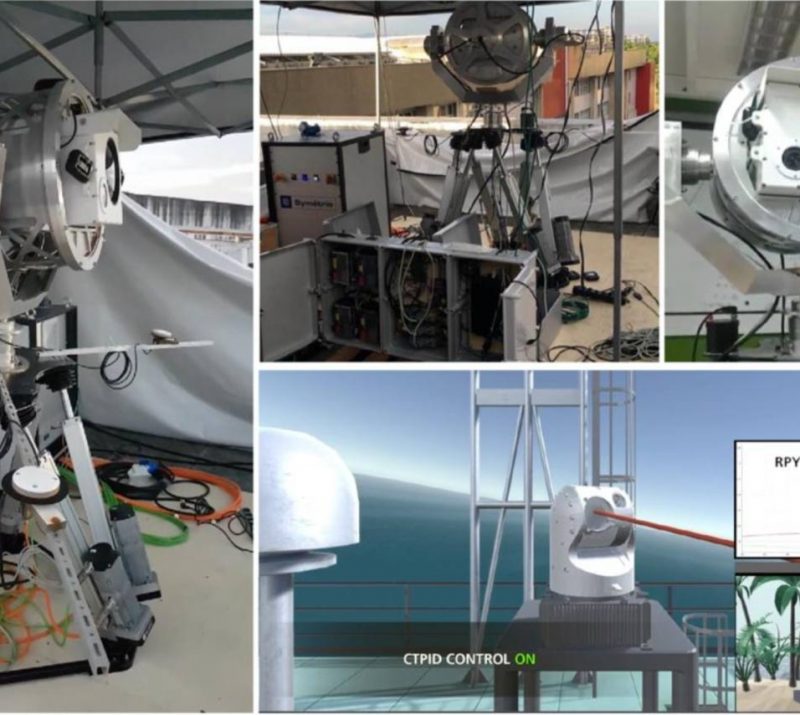
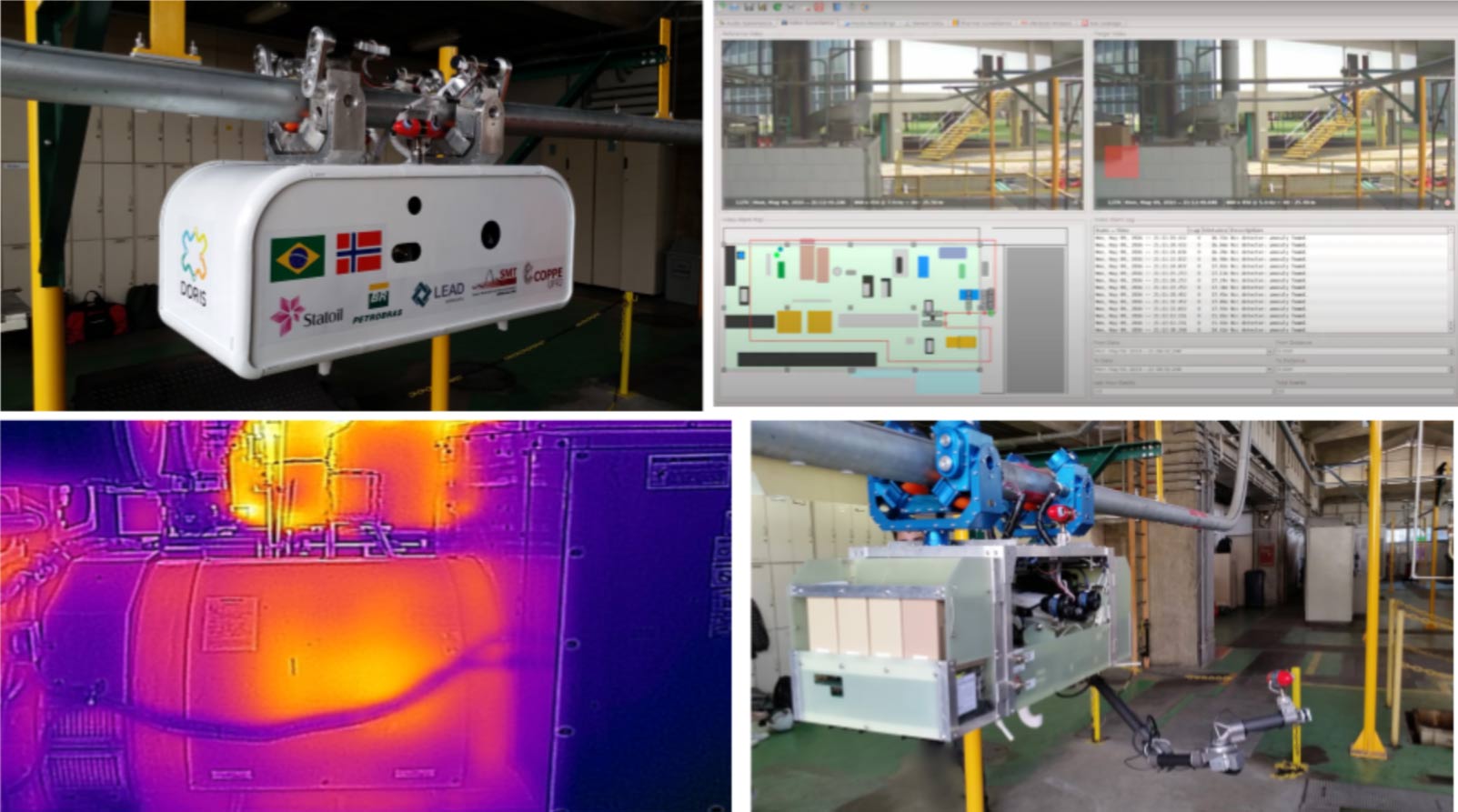
O protótipo do novo sistema robótico é capaz de se mover em ambientes similares aos encontrados em instalações offshore. O sistema robótico se locomove ao longo de um trilho, que pode ser instalado em áreas de difícil acesso, incluindo as plataformas atuais, que em principio não foram projetadas tendo em vista sua completa automatização.
O sistema robótico é autônomo em relação à energia e deve permitir a mobilidade 3D de forma eficiente.
Para a inspeção, detecção e diagnóstico de anomalias é utilizada uma combinação de câmeras fixa, pan-tilt-zoom (PTZ) e térmicas, sondas para hidrocarbonetos e gases inflamáveis, sensores para ruído acústico e vibração.
O robô é integrado com o controle da base/plataforma usando comunicação sem fio. Todos os dados adquiridos poderão ser armazenados em um sistema de banco de dados integrado ao sistema de controle da plataforma.
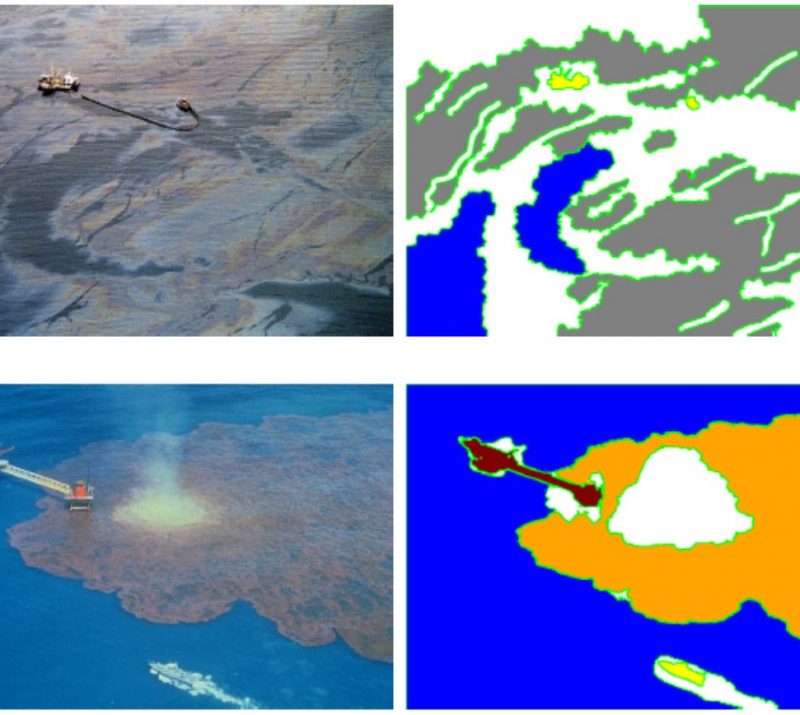
O sistema é capaz de navegar através do trilho executando tarefas de rotina ou de monitoramento específico. O software de processamento de sinais desenvolvido permite a detecção de intrusos, objetos abandonados, fumaça, fogo e vazamento de líquidos, leitura de válvulas e instrumentos e diagnóstico de máquinas.
O sistema robótico pode ser teleoperado ou trabalhar de forma autônoma. Os recursos de teleoperação e monitoramento permitem o acesso on-line aos sensores/câmeras embarcados recebendo informações sobre o ambiente circundante e as condições de operação do robô, permitindo o processamento inteligente em tempo real.
O sistema robótico completo foi avaliado através de testes realizados nas instalações do Centro de Pesquisas da Petrobras (CENPES). O objetivo foi validar o conceito de mobilidade, bem como as funcionalidades de sensoriamento utilizadas nas atividades de inspeção e monitoramento em um cenário mais próximo do real.
Resultados
- Nakahata, M. T., Thomaz, L. A., da Silva, A. F., da Silva, E. A., & Netto, S. L. (2017). Anomaly detection with a moving camera using spatio-temporal codebooks. Multidimensional Systems and Signal Processing, 1-30.
- Carvalho, G., Xaud, M., Marcovistz, I., Neves, A., and Costa, R. (2017). The DORIS offshore robot: Recent developments and real-world demonstration results. In Proceedings of the 20th IFAC World Congress.
- Carvalho, G. and Costa, R. (2017). Localization of an autonomous rail-guided robot using particle lter. InProceedings of the 20th IFAC World Congress.
- Thomaz, L. A., da Silva, A. F., da Silva, E. A., Netto, S. L. & Krim, H. (2017). Detection of Abandoned Objects Using Robust Subspace Recovery with Intrinsic Video Alignment. In Circuits & Systems (ISCAS), 2017 IEEE International Symposium on.
- Prego, T. D. M., de Lima, A. A., Netto, S. L., & da Silva, E. A. (2016). Audio anomaly detection on rotating machinery using image signal processing. In Circuits & Systems (LASCAS), 2016 IEEE 7th Latin American Symposium on (pp. 207-210).
- Freitas, R. (2016). Arquitetura Híbrida e Controle de Missão de Robôs Autônomos, M.Sc. thesis, COPPE/UFRJ.
- Xaud, M. (2016). Modeling, Control and Electromechanical Design of a Modular Lightweight Manipulator for Interaction and Inspection Tasks, M.Sc. thesis, COPPE/UFRJ.
- Carvalho, G. H. F. (2015). Automatic Detection of Abandoned Objects with a Moving Camera Using Multiscale Video Analysis, D.Sc. thesis, COPPE/UFRJ.
- Freitas, R. S., Xaud, M. F., Marcovistz, I., Neves, A. F., Faria, R. O., Carvalho, G. P, et al. (2015). The Embedded Electronics and Software of DORIS Offshore Robot. IFAC-PapersOnLine, 48(6), 208-213.
- Jardim, E., Bian, X., da Silva, E. A., Netto, S. L., & Krim, H. (2015). On the detection of abandoned objects with a moving camera using robust subspace recovery and sparse representation. In Acoustics, Speech and Signal Processing (ICASSP), 2015 IEEE International Conference on (pp. 1295-1299).
PROJETOS RELACIONADOS